MOTORES
Un motor en Arduino se refiere a cualquier dispositivo electromecánico que convierte energía eléctrica en movimiento, y que puede ser controlado desde una placa Arduino mediante señales eléctricas o pulsos.
En proyectos con Arduino, se usan principalmente tres tipos de motores:
- Motor DC (Corriente continua): Gira en una dirección cuando recibe corriente. Cambiando la polaridad, cambia de sentido.
- Servomotor: Motor de precisión que se posiciona en un ángulo específico (por ejemplo, de 0° a 180°) según una señal PWM.
- Motor paso a paso: Gira en pasos discretos. Cada pulso mueve el eje una fracción de vuelta.

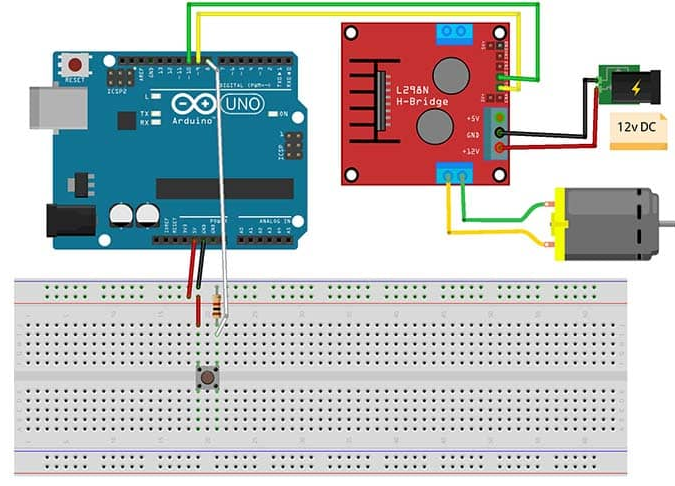
MOTOR DC
PWM (Modulación por ancho de pulso)
Es una técnica donde se envían pulsos digitales a diferentes anchos para controlar velocidad (en motores DC) o posición (en servos).
Para motores DC: Señales PWM para regular velocidad, y H-Bridge (puente H) para controlar dirección.
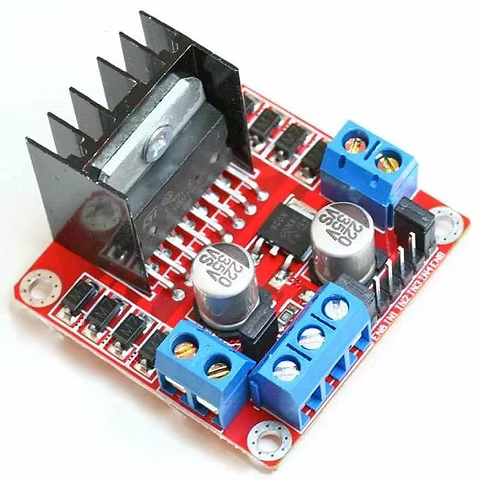
Puente H/Controlador/Driver de Motor L298N Con Shield Para Arduino

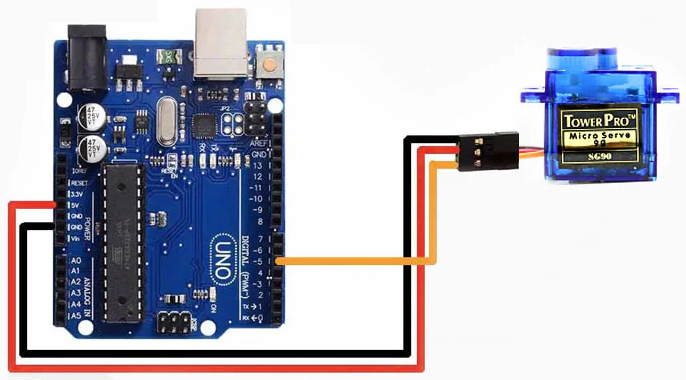
ServoMotor Arduino
Un servomotor es un tipo de motor controlado electrónicamente que permite mover su eje a una posición específica dentro de un rango limitado (generalmente de 0° a 180°, aunque hay servos de 270° o de rotación continua).
A diferencia de un motor DC normal, que solo gira cuando le das corriente, el servomotor se posiciona en un ángulo determinado de acuerdo a una señal que recibe de Arduino.
Un servomotor en Arduino es un motor de precisión que se posiciona en un ángulo exacto mediante una señal de pulso, ideal para proyectos de:
- Robótica
- Brazos mecánicos
- Control de compuertas
- Cámaras móviles
- Vehículos autónomos

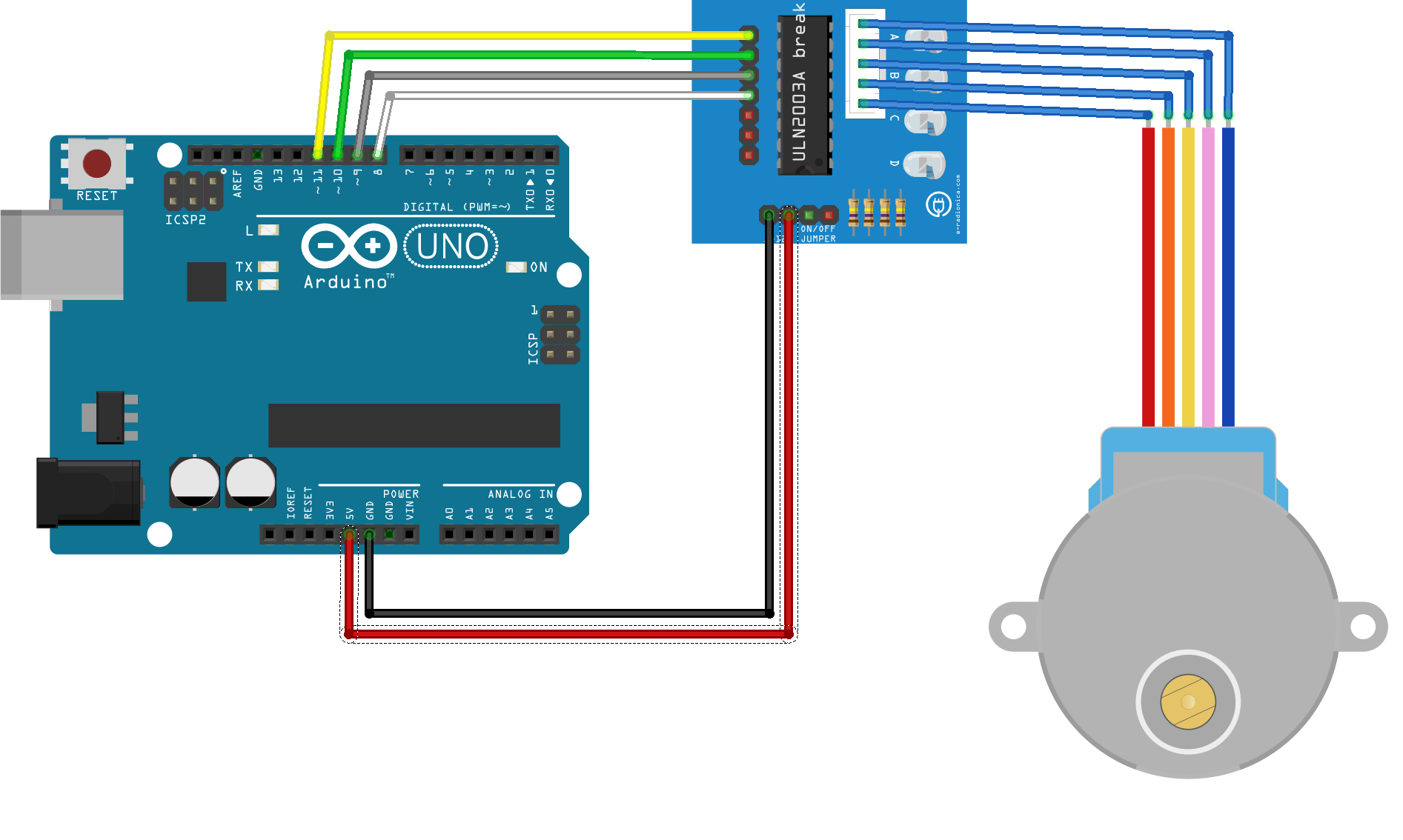
Motor Paso a Paso
Un motor paso a paso es un tipo de motor eléctrico que divide una vuelta completa en una serie de pasos precisos y controlados. A diferencia de un motor DC, que gira libremente al recibir corriente, un paso a paso avanza su eje en incrementos fijos de ángulo cuando se activan sus bobinas en una secuencia específica.
Cada paso equivale a un pequeño giro (por ejemplo, 1.8°), por lo que puedes controlar con precisión cuántos grados girará y en qué dirección.
Un motor paso a paso tiene varias bobinas (electroimanes internos) dispuestas alrededor de un rotor dentado. Controlando qué bobinas se energizan y en qué orden, se hace que el rotor avance de un diente al siguiente.
Arduino no controla directamente los motores paso a paso, sino que envía señales de control a un driver (por ejemplo, ULN2003, A4988 o L298N) que gestiona la energía que llega a las bobinas.
Dr. Omar Zárate Navarro
Universidad Tecnológica de Jalisco
PTC Tecnologías de la Información
|
Email: ozarate@utj.edu.mx
|
|
